|
World of Rigid Bodies (WoRB)
|
|
World of Rigid Bodies (WoRB)
|
The World of Rigid Bodies (WoRB) Simulation Framework. More...
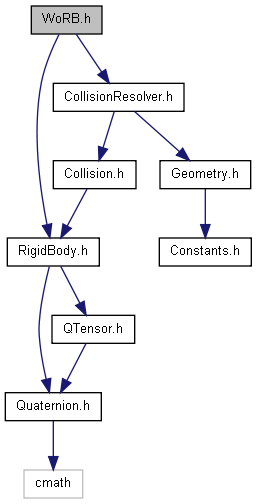
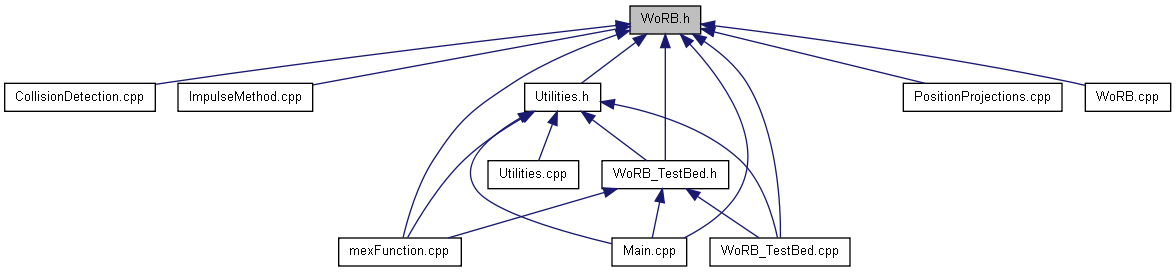
Go to the source code of this file.
Data Structures | |
| class | WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions > |
| Encapsulates a system of rigid bodies. More... | |
| class | WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions >::RigidBodies |
| Represents a rigid body iterator for the WorldOfRigidBodies class. More... | |
Namespaces | |
| namespace | WoRB |
Functions | |
| void | WoRB::Printf (const char *format,...) |
| User defined ANSI C printf-style output routine. | |
| void | WoRB::SevereError (const char *errorId, const char *format,...) |
| Reports a severe error (with errorId compatible with MATLAB) and quits. | |
 1.8.0
1.8.0 
